Project:Physical Computing/Woensdag 13 sep/Olivier opdracht 13 sep: verschil tussen versies
Naar navigatie springen
Naar zoeken springen
Geen bewerkingssamenvatting |
Geen bewerkingssamenvatting |
||
| (Een tussenliggende versie door dezelfde gebruiker niet weergegeven) | |||
| Regel 8: | Regel 8: | ||
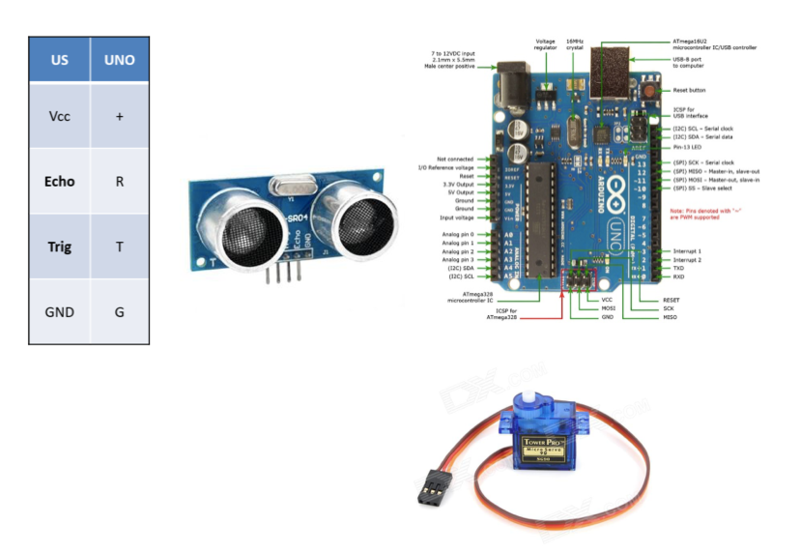
Onderdelen: | Onderdelen: | ||
[[Bestand:Olivier-onderdelen-1.png|left| | [[Bestand:Olivier-onderdelen-1.png|left|800px|Onderdelen-1]] | ||
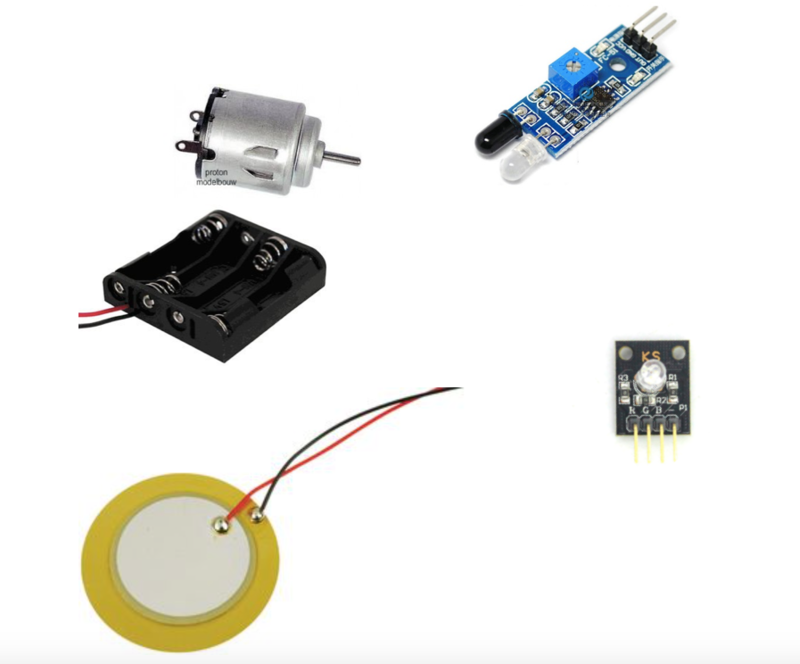
[[Bestand:Olivier-onderdelen-2.png|left|800px|Onderdelen-2]] | |||
Huidige versie van 12 sep 2017 om 19:39
- Ontwerp met onderstaande onderdelen een zichzelf voortbewegende robot die objecten ontwijkt. Daarnaast kan de robot aangeven wanneer deze een obstakel ontmoet.
- Schets je ontwerp op papier of gebruik een tekenprogramma op je computer.
- Geef met het programma ‘fritzing’ aan hoe je de verschillende sensoren en actuatoren aansluit.
- Beschrijf de werking van een RGB-sensor, een ultrasoonsensor en een electromotor.
Geef aan hoe je de robot zou programmeren voor object vermijden met een besturingsprogramma naar eigen keuze.
Onderdelen:

